
ここのところずっと特注品ばかり製作していて、あまりオープンにできる記事が出せませんでした。
やっと少しだけ間が空きましたので、ラズパイのポータブル化をやってみました。

なに故 こんな物が必要?
最近色々とセンサを使ったりデバイスを制御したりする案件が増えて来て、いままでのワンボード作るのはで良いのですけど、製作に入る前にセンサの感度とか適応可否を現場で確認したい。。。
GPCSTNのワンボードは組込プログラムなので、センサ感度とか動作の荷重設定とかの当てが外れたら、事務所に戻ってパラメータを直してプログラムを再コンパイルして現場に戻らなければならない。パラメータ調整のルーチンを入れておけば良いのだけど、其れにも相応の時間が食われてしまう。
なら現場でパラメータ修正の再コンパイルが出来れば良いですね。と云うか、もう面倒なので現場でセンサの基本データを録ったり、その場の思い付きで大体のアルゴリズムを組んでしまえば仕事が早くなります。
なんせこの前は、室内では動作良好だったセンサが屋外でチェックすると異常値が出まくり。割りと誰でも使ってるセンサだったので安心して使っていたけど、思いっきり肩が落ちました。

そうするとやっぱりラズパイ。
I/O端子の付いているコンピュータ。
本チャンのCプログラムを書く前に、簡単にPythonでセンサやI/Oデバイスのデバッグが出来ます。

ラズパイに小型モニタを付けて、バッテリと共に筐体に組込。ラズパイは内蔵可能・外出し可能。これで何処でもプログラムが組めます。

特に制御基板を作っている時は強いです。

ラズパイ内蔵時。
ちょっとケーブルがウザい。
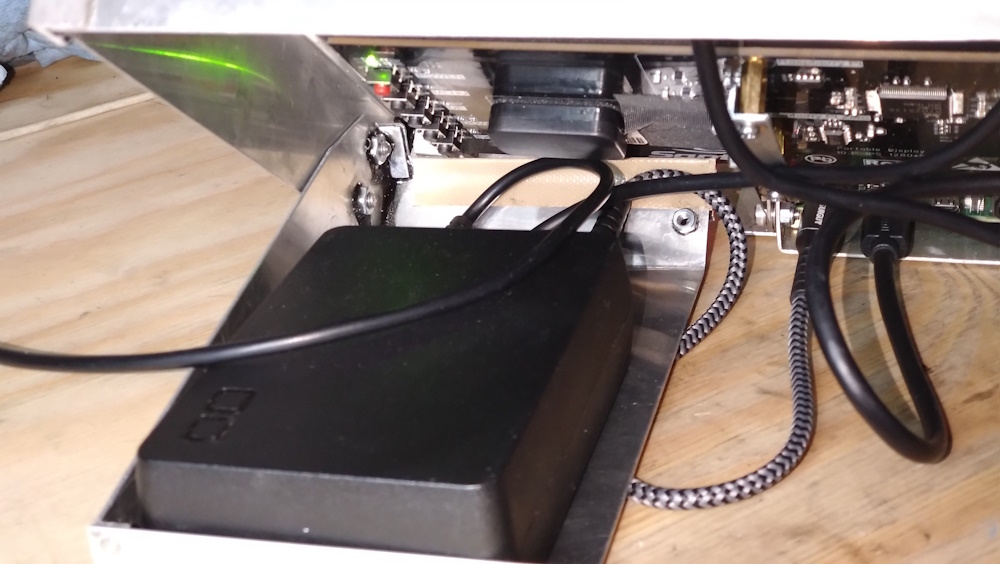
バッテリ。USB-PD
パススルーなので、事務所とかでは充電しながらプログラミングとかできます。
今まではちょっとしたセンサの確認でも面倒な表示回路を作ったりしていましたので、最初の現場調査に掛かるまでも相応の準備期間が必要でしたけど、今後は準備する物資が減らせますので、対応も早くなりそうですね。
Bye! by Kisaki.

