
やっと試作機が出来ました。
リモコンで自走する超音波測定機です。
(ちょっと汚れちゃいましたけど、、、)

かれこれ3年近く前、高所の配管の肉厚測定を行うべく開発を始め、その時は「3ヶ月くらいじゃないかな~」と言ってましたが、結局は3年も掛かってしまいました。
どっから3ヶ月なんて言ったのか不思議。そう云えば似た様なシステムを突貫で2ヶ月くらいで仕上げたので、その応用・組み合わせなんで、3ヶ月って言ってしまった様な気が、、、
出来てしまえば単純な形ですが、当初は「まるで進まない」とか「吸着が弱い」とか「消費電力が多過ぎる」とか「ダサイ」とかで、大規模な設計変更を2回も繰り返してしまいました。

要は主に鋼製の配管や壁面に張り付いて肉厚を測る事が出来ます。
ただそれだけですが、いちおう垂直面とか逆さ背面にも張り付いて前後左右に走行することが出来ます。
電源は従来のポールUTで使っていたポータブルバッテリで運用可能ですので、高所に登ったとしても電工ドラム等で電源を引っ張って来る必要はありません。
操作系にはGPCSTNを採用したので、プログラミング等は少し楽でした。
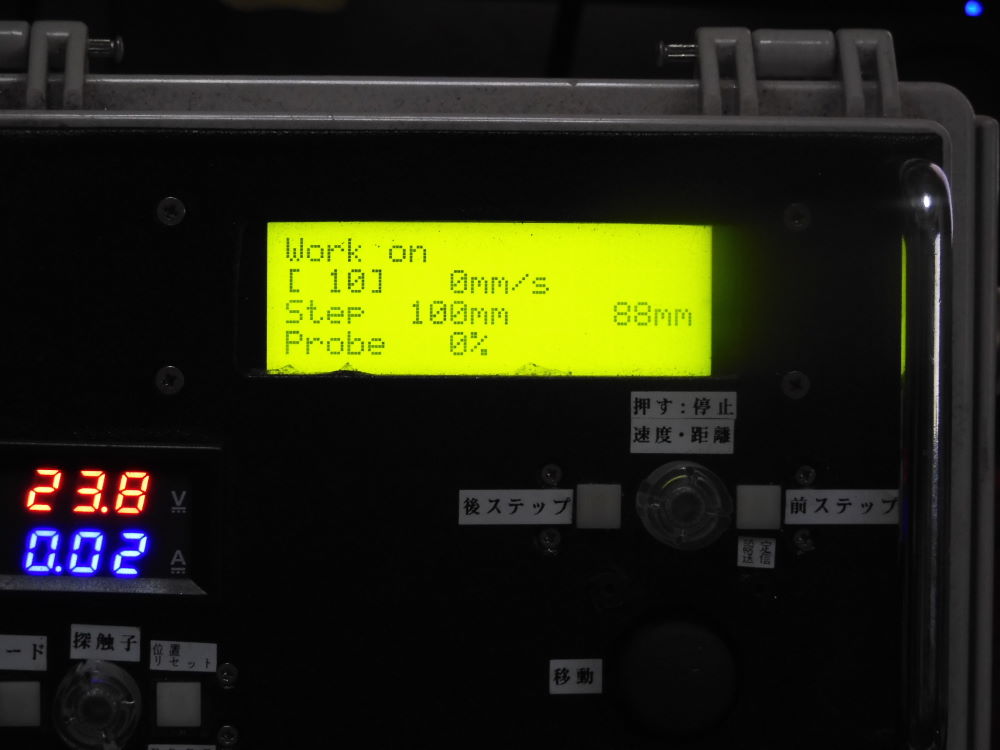
おまけ機能として、距離ステップ移動も付けてみました。ボタンを押して一度に100・200・500mmの距離を移動しますので、手の届かない所での等距離移動も可能です。それ以外の中途半端な距離には、通算移動距離表示や距離リセットを使えば良い様にしてみました。
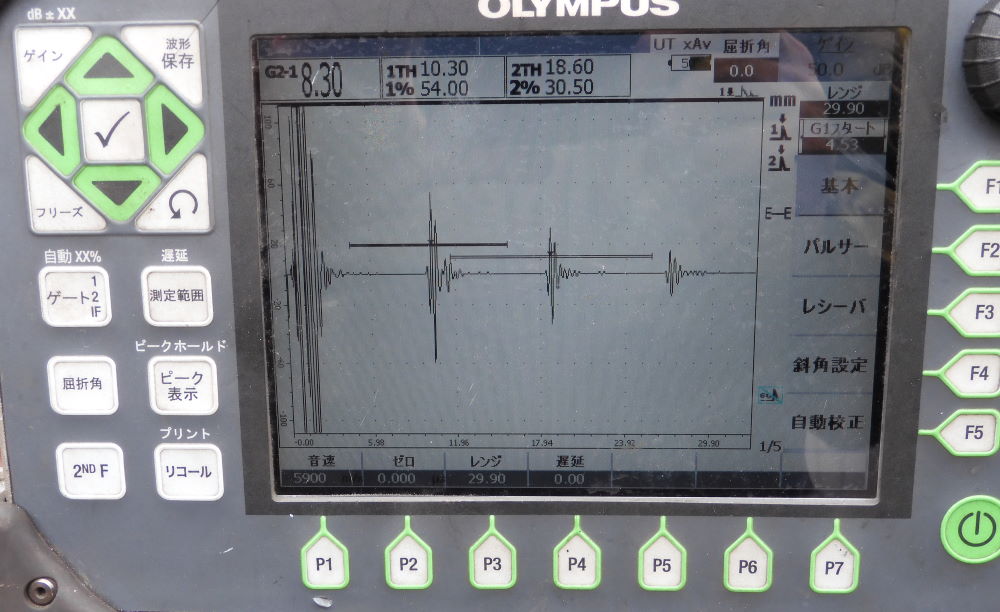
超音波探触子の接触は実績のあるポールUTの機構を踏襲し、肉厚測定時に要求される「探り操作」もジョイスティック操作で可能としました。永久磁石タイプのポールUT先端部と設計を同一にして、手操作とリモコン操作での操作感覚をなるべく合わせられる様に気を使ってみました。

探触子を接触させる際の接触媒質は矢張り「水」がいちばん良いですね。
先日ドライ探傷を実現化しましたが、どうしても現場で測定対象となる物は表面に砂埃等が被ってしまっていますので、それらを洗い流す役目を含めて水がいちばん使い易いです。
未だ細かい所で電気的特性のチューニングをもう少し煮詰めたりしたいですね。オートチューニングが入れられれば最高ですけど。また、吸着力が強すぎるのを落とすとか、もう少し電源消費を減らしたいとか、パソコンでの自動運転(意味が無いかな?)をやりたいとか、ちょっとキリが無さそうですね。
Bye! by Kisaki.

